このレッスンでは、測定の数学的な記述として互いに等価な二つの方法を紹介します。
一般測定は、各測定結果に対応する行列の集まり によって記述できます。これは射影測定の記述を一般化したものです。
一般測定は、出力が常に古典的状態(対角密度行列で表される)となるチャネル として記述できます。
ここでは、可能な結果が有限個 の測定のみを扱います。
無限個の結果を持つ測定も定義できますが、計算や情報処理の文脈では一般的でなく、また適切に形式化するには追加の数学(測度論)が必要になります。
最初は、いわゆる破壊的 測定に焦点を当てます。これは、測定の出力が古典的な測定結果のみであり、測定されたシステムの測定後の量子状態を指定しないものです。
直感的には、このような測定は量子システム自体を破壊するか、測定が行われた後すぐにシステムが廃棄されると考えることができます。
レッスンの後半では、古典的な測定結果と測定後の量子状態の両方が存在する非破壊的 測定についても考えます。
行列の集まりとしての測定
X \mathsf{X} X X \mathsf{X} X n n n { 0 , … , n − 1 } \{0,\ldots, n-1\} { 0 , … , n − 1 } X \mathsf{X} X n × n n\times n n × n X \mathsf{X} X X \mathsf{X} X n n n m m m 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1
これらの名前は単純化のために使っているだけです。
以下で述べることはすべて、他の有限な古典的状態集合や測定結果の集合に対しても、適宜名前を変えることで直接一般化できます。
射影測定
射影測定 とは、恒等行列に和が等しい射影行列 の集まりによって記述されるものであることを思い出してください。
記号で表すと、
{ Π 0 , … , Π m − 1 } \{\Pi_0,\ldots,\Pi_{m-1}\} { Π 0 , … , Π m − 1 } は、各 Π a \Pi_a Π a n × n n\times n n × n X \mathsf{X} X
Π 0 + ⋯ + Π m − 1 = I X \Pi_0 + \cdots + \Pi_{m-1} = \mathbb{I}_{\mathsf{X}} Π 0 + ⋯ + Π m − 1 = I X このような測定が量子状態ベクトル ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ X \mathsf{X} X a a a ∥ Π a ∣ ψ ⟩ ∥ 2 \|\Pi_a\vert\psi\rangle\|^2 ∥ Π a ∣ ψ ⟩ ∥ 2 X \mathsf{X} X Π a ∣ ψ ⟩ \Pi_a\vert\psi\rangle Π a ∣ ψ ⟩
X \mathsf{X} X ∣ ψ ⟩ \vert\psi\rangle ∣ ψ ⟩ ρ \rho ρ a a a Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ )
ρ = ∣ ψ ⟩ ⟨ ψ ∣ \rho = \vert \psi\rangle\langle\psi\vert ρ = ∣ ψ ⟩ ⟨ ψ ∣
Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . \operatorname{Tr}(\Pi_a \rho)
= \operatorname{Tr}(\Pi_a \vert \psi\rangle\langle\psi \vert)
= \langle \psi \vert \Pi_a \vert \psi \rangle
= \langle \psi \vert \Pi_a \Pi_a \vert \psi \rangle
= \|\Pi_a\vert\psi\rangle\|^2. Tr ( Π a ρ ) = Tr ( Π a ∣ ψ ⟩ ⟨ ψ ∣ ) = ⟨ ψ ∣ Π a ∣ ψ ⟩ = ⟨ ψ ∣ Π a Π a ∣ ψ ⟩ = ∥ Π a ∣ ψ ⟩ ∥ 2 . ここで、第二の等号ではトレースの巡回性を利用しており、第三の等号では各 Π a \Pi_a Π a Π a 2 = Π a \Pi_a^2 = \Pi_a Π a 2 = Π a
一般に、ρ \rho ρ
ρ = ∑ k = 0 N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ \rho = \sum_{k = 0}^{N-1} p_k \vert \psi_k\rangle\langle \psi_k \vert ρ = k = 0 ∑ N − 1 p k ∣ ψ k ⟩ ⟨ ψ k ∣ であれば、Tr ( Π a ρ ) \operatorname{Tr}(\Pi_a \rho) Tr ( Π a ρ ) ρ \rho ρ a a a
Tr ( Π a ρ ) = ∑ k = 0 N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = ∑ k = 0 N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 \operatorname{Tr}(\Pi_a \rho)
= \sum_{k = 0}^{N-1} p_k \operatorname{Tr}(\Pi_a \vert \psi_k\rangle\langle\psi_k\vert)
= \sum_{k = 0}^{N-1} p_k \|\Pi_a\vert\psi_k\rangle\|^2 Tr ( Π a ρ ) = k = 0 ∑ N − 1 p k Tr ( Π a ∣ ψ k ⟩ ⟨ ψ k ∣ ) = k = 0 ∑ N − 1 p k ∥ Π a ∣ ψ k ⟩ ∥ 2 一般測定
一般測定の数学的記述は、射影測定の定義を緩和することで得られます。
具体的には、測定を記述する集まりの中の行列を、射影行列ではなく任意の半正定値 行列にすることを許します。
(射影行列は常に半正定値です。射影行列は、固有値がすべて 0 または 1 である半正定値行列とも定義できます。)
特に、結果 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 X \mathsf{X} X X \mathsf{X} X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
P 0 + ⋯ + P m − 1 = I X . P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}}. P 0 + ⋯ + P m − 1 = I X . システム X \mathsf{X} X ρ \rho ρ a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 } Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
当然の要求として、一般測定の結果確率のベクトル
( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) \bigl(\operatorname{Tr}(P_0 \rho),\ldots,\operatorname{Tr}(P_{m-1} \rho)\bigr) ( Tr ( P 0 ρ ) , … , Tr ( P m − 1 ρ ) ) は、任意の密度行列 ρ \rho ρ
任意の二つの半正定値行列の積のトレースは常に非負であるため、各値 Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
Q , R ≥ 0 ⇒ Tr ( Q R ) ≥ 0. Q, R \geq 0 \; \Rightarrow \: \operatorname{Tr}(QR) \geq 0. Q , R ≥ 0 ⇒ Tr ( QR ) ≥ 0. この事実を示す一つの方法は、Q Q Q R R R Q R QR QR
条件 P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X 1 1 1
∑ a = 0 m − 1 Tr ( P a ρ ) = Tr ( ∑ a = 0 m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1 \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho)
= \operatorname{Tr}\Biggl(\sum_{a = 0}^{m-1} P_a \rho\Biggr)
= \operatorname{Tr}(\mathbb{I}\rho) = \operatorname{Tr}(\rho) = 1 a = 0 ∑ m − 1 Tr ( P a ρ ) = Tr ( a = 0 ∑ m − 1 P a ρ ) = Tr ( I ρ ) = Tr ( ρ ) = 1
例1:任意の射影測定
射影行列は常に半正定値であるため、すべての射影測定は一般測定の例です。
例えば、量子ビットの標準基底測定は { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
P 0 = ∣ 0 ⟩ ⟨ 0 ∣ = ( 1 0 0 0 ) および P 1 = ∣ 1 ⟩ ⟨ 1 ∣ = ( 0 0 0 1 ) . P_0 = \vert 0\rangle\langle 0\vert =
\begin{pmatrix}
1 & 0 \\ 0 & 0
\end{pmatrix}
\quad\text{および}\quad
P_1 = \vert 1\rangle\langle 1\vert =
\begin{pmatrix}
0 & 0 \\ 0 & 1
\end{pmatrix}. P 0 = ∣0 ⟩ ⟨ 0∣ = ( 1 0 0 0 ) および P 1 = ∣1 ⟩ ⟨ 1∣ = ( 0 0 0 1 ) . 状態 ρ \rho ρ
Prob ( outcome = 0 ) = Tr ( P 0 ρ ) = Tr ( ∣ 0 ⟩ ⟨ 0 ∣ ρ ) = ⟨ 0 ∣ ρ ∣ 0 ⟩ Prob ( outcome = 1 ) = Tr ( P 1 ρ ) = Tr ( ∣ 1 ⟩ ⟨ 1 ∣ ρ ) = ⟨ 1 ∣ ρ ∣ 1 ⟩ \begin{aligned}
\operatorname{Prob}(\text{outcome} = 0)
& = \operatorname{Tr}(P_0 \rho) =
\operatorname{Tr}\bigl(\vert 0\rangle\langle 0\vert \rho\bigr) =
\langle 0\vert \rho \vert 0 \rangle \\[1mm]
\operatorname{Prob}(\text{outcome} = 1)
& = \operatorname{Tr}(P_1 \rho) =
\operatorname{Tr}\bigl(\vert 1\rangle\langle 1\vert\rho\bigr) =
\langle 1 \vert \rho \vert 1 \rangle
\end{aligned} Prob ( outcome = 0 ) Prob ( outcome = 1 ) = Tr ( P 0 ρ ) = Tr ( ∣0 ⟩ ⟨ 0∣ ρ ) = ⟨ 0∣ ρ ∣0 ⟩ = Tr ( P 1 ρ ) = Tr ( ∣1 ⟩ ⟨ 1∣ ρ ) = ⟨ 1∣ ρ ∣1 ⟩ 例2:非射影量子ビット測定
X \mathsf{X} X
P 0 = ( 2 3 1 3 1 3 1 3 ) P 1 = ( 1 3 − 1 3 − 1 3 2 3 ) P_0 =
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\qquad
P_1 =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix} P 0 = ( 3 2 3 1 3 1 3 1 ) P 1 = ( 3 1 − 3 1 − 3 1 3 2 ) これらはどちらも半正定値行列です。エルミート行列であり、両方の場合で固有値は 1 / 2 ± 5 / 6 1/2 \pm \sqrt{5}/6 1/2 ± 5 /6 P 0 + P 1 = I P_0 + P_1 = \mathbb{I} P 0 + P 1 = I { P 0 , P 1 } \{P_0,P_1\} { P 0 , P 1 }
X \mathsf{X} X ρ \rho ρ 0 0 0 Tr ( P 0 ρ ) \operatorname{Tr}(P_0 \rho) Tr ( P 0 ρ ) 1 1 1 Tr ( P 1 ρ ) \operatorname{Tr}(P_1 \rho) Tr ( P 1 ρ ) ρ = ∣ + ⟩ ⟨ + ∣ \rho = \vert + \rangle \langle + \vert ρ = ∣ + ⟩ ⟨ + ∣ 0 0 0 1 1 1
Tr ( P 0 ρ ) = Tr ( ( 2 3 1 3 1 3 1 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 2 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) + ( 1 3 ⋅ 1 2 + 1 3 ⋅ 1 2 ) = 1 2 + 1 3 = 5 6 Tr ( P 1 ρ ) = Tr ( ( 1 3 − 1 3 − 1 3 2 3 ) ( 1 2 1 2 1 2 1 2 ) ) = ( 1 3 ⋅ 1 2 − 1 3 ⋅ 1 2 ) + ( − 1 3 ⋅ 1 2 + 2 3 ⋅ 1 2 ) = 0 + 1 6 = 1 6 \begin{aligned}
\operatorname{Tr}(P_0 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{2}{3} & \frac{1}{3}\\[2mm]
\frac{1}{3} & \frac{1}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{2}{3} \cdot \frac{1}{2} + \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(\frac{1}{3}\cdot\frac{1}{2} + \frac{1}{3}\cdot\frac{1}{2}\biggr)\\
& = \frac{1}{2} + \frac{1}{3} = \frac{5}{6}\\[4mm]
\operatorname{Tr}(P_1 \rho)
& = \operatorname{Tr}\left(
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3}\\[2mm]
-\frac{1}{3} & \frac{2}{3}
\end{pmatrix}
\begin{pmatrix}
\frac{1}{2} & \frac{1}{2}\\[2mm]
\frac{1}{2} & \frac{1}{2}
\end{pmatrix}
\right)\\[4mm]
& = \biggl(\frac{1}{3} \cdot \frac{1}{2} - \frac{1}{3} \cdot \frac{1}{2}\biggr)
+ \biggl(-\frac{1}{3}\cdot\frac{1}{2} + \frac{2}{3}\cdot\frac{1}{2}\biggr)\\
& = 0 + \frac{1}{6} = \frac{1}{6}
\end{aligned} Tr ( P 0 ρ ) Tr ( P 1 ρ ) = Tr ( ( 3 2 3 1 3 1 3 1 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 2 ⋅ 2 1 + 3 1 ⋅ 2 1 ) + ( 3 1 ⋅ 2 1 + 3 1 ⋅ 2 1 ) = 2 1 + 3 1 = 6 5 = Tr ( ( 3 1 − 3 1 − 3 1 3 2 ) ( 2 1 2 1 2 1 2 1 ) ) = ( 3 1 ⋅ 2 1 − 3 1 ⋅ 2 1 ) + ( − 3 1 ⋅ 2 1 + 3 2 ⋅ 2 1 ) = 0 + 6 1 = 6 1 例3:四面体測定
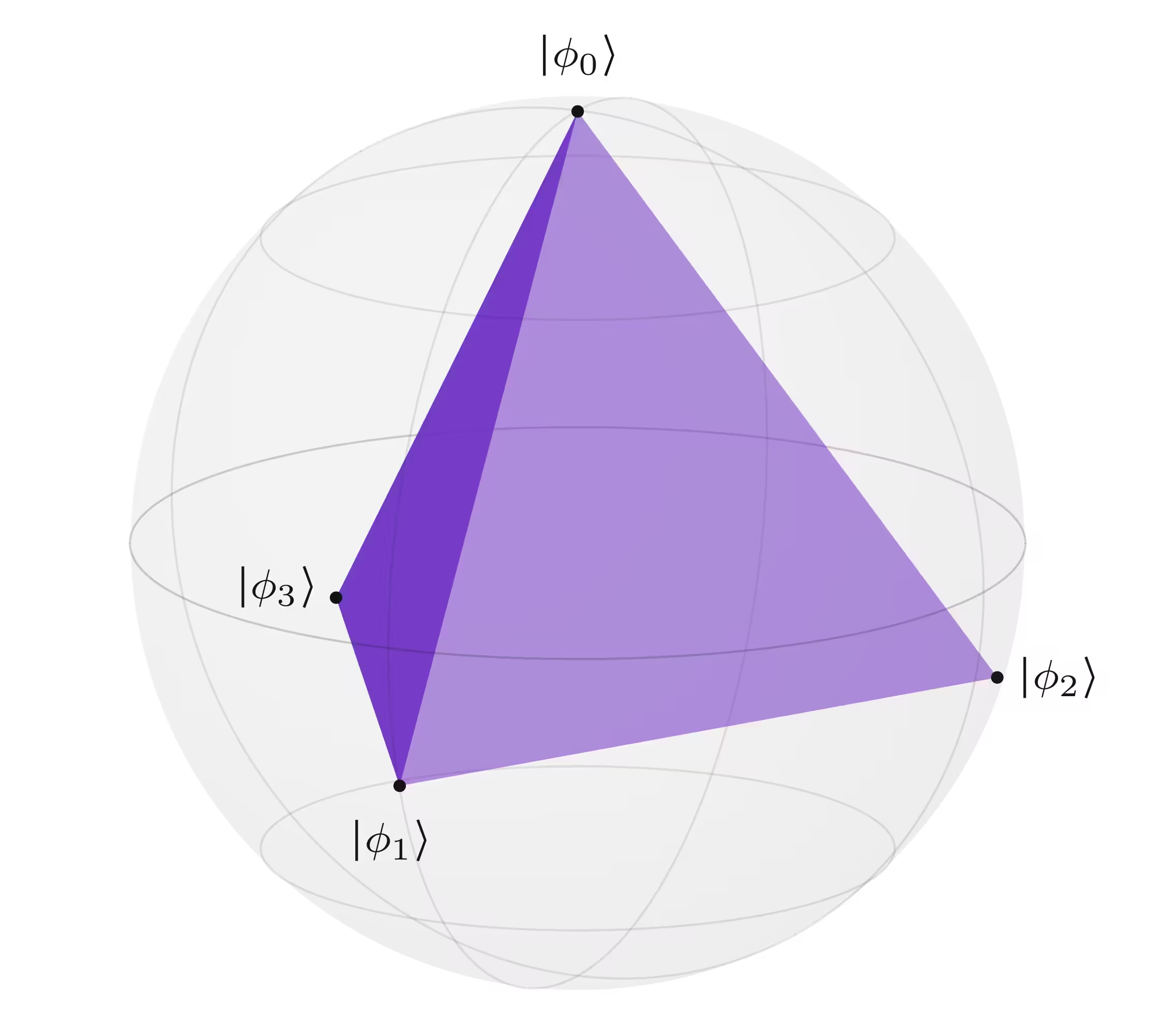
次のように四つの一量子ビット量子状態ベクトルを定義します。
∣ ϕ 0 ⟩ = ∣ 0 ⟩ ∣ ϕ 1 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 ∣ 1 ⟩ ∣ ϕ 2 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e 2 π i / 3 ∣ 1 ⟩ ∣ ϕ 3 ⟩ = 1 3 ∣ 0 ⟩ + 2 3 e − 2 π i / 3 ∣ 1 ⟩ \begin{aligned}
\vert\phi_0\rangle & = \vert 0 \rangle\\
\vert\phi_1\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} \vert 1\rangle \\
\vert\phi_2\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{2\pi i/3} \vert 1\rangle \\
\vert\phi_3\rangle & = \frac{1}{\sqrt{3}}\vert 0 \rangle + \sqrt{\frac{2}{3}} e^{-2\pi i/3} \vert 1\rangle
\end{aligned} ∣ ϕ 0 ⟩ ∣ ϕ 1 ⟩ ∣ ϕ 2 ⟩ ∣ ϕ 3 ⟩ = ∣0 ⟩ = 3 1 ∣0 ⟩ + 3 2 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e 2 πi /3 ∣1 ⟩ = 3 1 ∣0 ⟩ + 3 2 e − 2 πi /3 ∣1 ⟩ これら四つの状態は、ブロッホ球に内接する正四面体 の頂点であることから、四面体 状態として知られることがあります。
ブロッホ球上でこれら四つの状態のデカルト座標は
( 0 , 0 , 1 ) , ( 2 2 3 , 0 , − 1 3 ) , ( − 2 3 , 2 3 , − 1 3 ) , ( − 2 3 , − 2 3 , − 1 3 ) , (0,0,1),\\[2mm]
\left( \frac{2\sqrt{2}}{3} , 0 , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , \sqrt{\frac{2}{3}} , -\frac{1}{3} \right),\\[1mm]
\left( -\frac{\sqrt{2}}{3} , -\sqrt{\frac{2}{3}} , -\frac{1}{3} \right), ( 0 , 0 , 1 ) , ( 3 2 2 , 0 , − 3 1 ) , ( − 3 2 , 3 2 , − 3 1 ) , ( − 3 2 , − 3 2 , − 3 1 ) , であり、これらの状態の密度行列表現をパウリ行列の線形結合として表すことで確認できます。
∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = I + σ z 2 \vert \phi_0 \rangle\langle \phi_0 \vert =
\begin{pmatrix}
1 & 0\\[1mm] 0 & 0
\end{pmatrix}
= \frac{\mathbb{I} + \sigma_z}{2} ∣ ϕ 0 ⟩ ⟨ ϕ 0 ∣ = ( 1 0 0 0 ) = 2 I + σ z ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = ( 1 3 2 3 2 3 2 3 ) = I + 2 2 3 σ x − 1 3 σ z 2 \vert \phi_1 \rangle\langle \phi_1 \vert =
\begin{pmatrix}
\frac{1}{3} & \frac{\sqrt{2}}{3} \\[2mm]
\frac{\sqrt{2}}{3} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} + \frac{2\sqrt{2}}{3} \sigma_x - \frac{1}{3}\sigma_z}{2} ∣ ϕ 1 ⟩ ⟨ ϕ 1 ∣ = 3 1 3 2 3 2 3 2 = 2 I + 3 2 2 σ x − 3 1 σ z ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 1 3 − 1 3 2 − i 6 − 1 3 2 + i 6 2 3 ) = I − 2 3 σ x + 2 3 σ y − 1 3 σ z 2 \vert \phi_2 \rangle\langle \phi_2 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x + \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 2 ⟩ ⟨ ϕ 2 ∣ = ( 3 1 − 3 2 1 + 6 i − 3 2 1 − 6 i 3 2 ) = 2 I − 3 2 σ x + 3 2 σ y − 3 1 σ z ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 1 3 − 1 3 2 + i 6 − 1 3 2 − i 6 2 3 ) = I − 2 3 σ x − 2 3 σ y − 1 3 σ z 2 \vert \phi_3 \rangle\langle \phi_3 \vert =
\begin{pmatrix}
\frac{1}{3} & -\frac{1}{3\sqrt{2}} + \frac{i}{\sqrt{6}} \\[2mm]
-\frac{1}{3\sqrt{2}} - \frac{i}{\sqrt{6}} & \frac{2}{3}
\end{pmatrix}
= \frac{\mathbb{I} - \frac{\sqrt{2}}{3} \sigma_x - \sqrt{\frac{2}{3}} \sigma_y - \frac{1}{3}\sigma_z}{2} ∣ ϕ 3 ⟩ ⟨ ϕ 3 ∣ = ( 3 1 − 3 2 1 − 6 i − 3 2 1 + 6 i 3 2 ) = 2 I − 3 2 σ x − 3 2 σ y − 3 1 σ z これら四つの状態はブロッホ球上で均一に分布しており、互いの距離はすべて等しく、任意の二つの状態間の角度も常に同じです。
次に、各 a = 0 , … , 3 a=0,\ldots,3 a = 0 , … , 3 P a P_a P a { P 0 , P 1 , P 2 , P 3 } \{P_0,P_1,P_2,P_3\} { P 0 , P 1 , P 2 , P 3 }
P a = ∣ ϕ a ⟩ ⟨ ϕ a ∣ 2 P_a = \frac{\vert\phi_a\rangle\langle\phi_a\vert}{2} P a = 2 ∣ ϕ a ⟩ ⟨ ϕ a ∣ これが有効な測定であることは次のように確認できます。
各 P a P_a P a 1 / 2 1/2 1/2 1 / 2 1/2 1/2
これらの行列の和は恒等行列です:P 0 + P 1 + P 2 + P 3 = I P_0 + P_1 + P_2 + P_3 = \mathbb{I} P 0 + P 1 + P 2 + P 3 = I
チャネルとしての測定
測定を数学的に記述する第二の方法は、チャネルとして記述することです。
古典情報は量子情報の特殊なケースと見なすことができます。すなわち、確率的状態を対角密度行列と同一視できます。
そのため、操作的な観点から、測定を測定対象のシステムの状態を記述する行列を入力とし、測定結果の分布を記述する対角 密度行列を出力とするチャネルとして考えることができます。
このような性質を持つチャネルは、半正定値行列の集まりとしての測定の記述と直接結びつく単純な標準形で書けることをすぐに見ていきます。
逆に、行列の集まりとして与えられた任意の測定に対しては、前の段落で示唆されているように、その測定を記述する対角出力の性質を持つ有効なチャネルが常に存在します。
これらの観察をまとめると、一般測定の二つの記述は等価であることがわかります。
さらに進む前に、測定について、それをチャネルとして見る方法、およびその前提について、より正確に述べましょう。
先ほどと同様に、X \mathsf{X} X m m m 0 , … , m − 1 0,\ldots,m-1 0 , … , m − 1 Y \mathsf{Y} Y { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 } X \mathsf{X} X Y \mathsf{Y} Y Φ \Phi Φ Y \mathsf{Y} Y 古典的 であること、すなわち X \mathsf{X} X Y \mathsf{Y} Y
Φ \Phi Φ Y \mathsf{Y} Y Δ m \Delta_m Δ m
Δ m ( σ ) = ∑ a = 0 m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ \Delta_m(\sigma) = \sum_{a = 0}^{m-1} \langle a \vert \sigma \vert a\rangle \,\vert a\rangle\langle a\vert Δ m ( σ ) = a = 0 ∑ m − 1 ⟨ a ∣ σ ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ このチャネルは前のレッスンの完全脱位相量子ビットチャネル Δ \Delta Δ
与えられた密度行列 σ \sigma σ σ = Δ m ( σ ) \sigma = \Delta_m(\sigma) σ = Δ m ( σ ) Φ \Phi Φ Y \mathsf{Y} Y
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) が X \mathsf{X} X ρ \rho ρ
チャネルから行列へ
X \mathsf{X} X Y \mathsf{Y} Y Φ \Phi Φ ρ \rho ρ
Φ ( ρ ) = Δ m ( Φ ( ρ ) ) \Phi(\rho) = \Delta_m(\Phi(\rho)) Φ ( ρ ) = Δ m ( Φ ( ρ )) を満たすとします。これは次のように言い換えることもできます。
Φ ( ρ ) = ∑ a = 0 m − 1 ⟨ a ∣ Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ (1) \Phi(\rho) =
\sum_{a = 0}^{m-1} \langle a \vert \Phi(\rho) \vert a\rangle\, \vert a\rangle\langle a \vert
\tag{1} Φ ( ρ ) = a = 0 ∑ m − 1 ⟨ a ∣Φ ( ρ ) ∣ a ⟩ ∣ a ⟩ ⟨ a ∣ ( 1 ) すべてのチャネルと同様に、Φ \Phi Φ A 0 , … , A N − 1 A_0,\ldots,A_{N-1} A 0 , … , A N − 1
Φ ( ρ ) = ∑ k = 0 N − 1 A k ρ A k † \Phi(\rho) = \sum_{k = 0}^{N-1} A_k \rho A_k^{\dagger} Φ ( ρ ) = k = 0 ∑ N − 1 A k ρ A k † これにより、Φ ( ρ ) \Phi(\rho) Φ ( ρ )
⟨ a ∣ Φ ( ρ ) ∣ a ⟩ = ∑ k = 0 N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = ∑ k = 0 N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) \begin{aligned}
\langle a \vert \Phi(\rho) \vert a\rangle
& = \sum_{k = 0}^{N-1} \langle a \vert A_k \rho A_k^{\dagger} \vert a\rangle \\
& = \sum_{k = 0}^{N-1} \operatorname{Tr}\bigl( A_k^{\dagger} \vert a\rangle\langle a \vert A_k \rho\bigr)\\
& = \operatorname{Tr}\bigl(P_a\rho\bigr)
\end{aligned} ⟨ a ∣Φ ( ρ ) ∣ a ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ρ A k † ∣ a ⟩ = k = 0 ∑ N − 1 Tr ( A k † ∣ a ⟩ ⟨ a ∣ A k ρ ) = Tr ( P a ρ ) ここで
P a = ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . P_a = \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k. P a = k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k . したがって、これらの行列 P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 Φ \Phi Φ
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a\rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ この表現は、行列による一般的な測定の記述と一致しています。各測定結果が確率 Tr ( P a ρ ) \operatorname{Tr}(P_a \rho) Tr ( P a ρ )
次に、行列の集合 { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } X \mathsf{X} X ∣ ψ ⟩ \vert \psi\rangle ∣ ψ ⟩
⟨ ψ ∣ P a ∣ ψ ⟩ = ∑ k = 0 N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = ∑ k = 0 N − 1 ∣ ⟨ a ∣ A k ∣ ψ ⟩ ∣ 2 ≥ 0. \langle \psi \vert P_a \vert \psi\rangle
= \sum_{k = 0}^{N-1} \langle \psi \vert A_k^{\dagger} \vert a\rangle\langle a \vert A_k\vert \psi\rangle
= \sum_{k = 0}^{N-1} \bigl\vert\langle a \vert A_k\vert \psi\rangle\bigr\vert^2 \geq 0. ⟨ ψ ∣ P a ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ ψ ∣ A k † ∣ a ⟩ ⟨ a ∣ A k ∣ ψ ⟩ = k = 0 ∑ N − 1 ⟨ a ∣ A k ∣ ψ ⟩ 2 ≥ 0. が成り立つことを観察することです。第2の性質は、これらの行列の和が単位行列になることです。
∑ a = 0 m − 1 P a = ∑ a = 0 m − 1 ∑ k = 0 N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = ∑ k = 0 N − 1 A k † ( ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = ∑ k = 0 N − 1 A k † A k = I X \begin{aligned}
\sum_{a = 0}^{m-1} P_a
& = \sum_{a = 0}^{m-1} \sum_{k = 0}^{N-1} A_k^{\dagger} \vert a\rangle\langle a \vert A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} \Biggl(\sum_{a = 0}^{m-1} \vert a\rangle\langle a \vert\Biggr) A_k \\
& = \sum_{k = 0}^{N-1} A_k^{\dagger} A_k \\
& = \mathbb{I}_{\mathsf{X}}
\end{aligned} a = 0 ∑ m − 1 P a = a = 0 ∑ m − 1 k = 0 ∑ N − 1 A k † ∣ a ⟩ ⟨ a ∣ A k = k = 0 ∑ N − 1 A k † ( a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ) A k = k = 0 ∑ N − 1 A k † A k = I X 最後の等式は、Φ \Phi Φ
行列からチャネルへ
次に、P 0 + ⋯ + P m − 1 = I X P_0 + \cdots + P_{m-1} = \mathbb{I}_{\mathsf{X}} P 0 + ⋯ + P m − 1 = I X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
Φ ( ρ ) = ∑ a = 0 m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ \Phi(\rho) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \rho) \vert a \rangle\langle a\vert Φ ( ρ ) = a = 0 ∑ m − 1 Tr ( P a ρ ) ∣ a ⟩ ⟨ a ∣ で定義される写像が、X \mathsf{X} X Y \mathsf{Y} Y
一つの方法は、この写像のChoi表現を計算することです。
J ( Φ ) = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = ∑ b , c = 0 n − 1 ∑ a = 0 m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = ∑ a = 0 m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ \begin{aligned}
J(\Phi) & = \sum_{b,c = 0}^{n-1} \vert b \rangle \langle c \vert \otimes \Phi(\vert b \rangle \langle c \vert)\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle c \vert \otimes
\operatorname{Tr}(P_a \vert b \rangle \langle c \vert) \vert a \rangle\langle a\vert\\[1mm]
& = \sum_{b,c = 0}^{n-1} \sum_{a = 0}^{m-1} \vert b \rangle \langle b \vert P_a^T \vert c \rangle \langle c \vert \otimes
\vert a \rangle\langle a\vert\\[1mm]
& = \sum_{a = 0}^{m-1} P_a^T \otimes \vert a \rangle\langle a\vert
\end{aligned} J ( Φ ) = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Φ ( ∣ b ⟩ ⟨ c ∣ ) = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ c ∣ ⊗ Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ = b , c = 0 ∑ n − 1 a = 0 ∑ m − 1 ∣ b ⟩ ⟨ b ∣ P a T ∣ c ⟩ ⟨ c ∣ ⊗ ∣ a ⟩ ⟨ a ∣ = a = 0 ∑ m − 1 P a T ⊗ ∣ a ⟩ ⟨ a ∣ 各 P a P_a P a
⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ . \langle c \vert P_a \vert b\rangle = \langle b \vert P_a^T \vert c\rangle. ⟨ c ∣ P a ∣ b ⟩ = ⟨ b ∣ P a T ∣ c ⟩ . が成り立つからです。これにより、∣ b ⟩ ⟨ b ∣ \vert b \rangle \langle b \vert ∣ b ⟩ ⟨ b ∣ ∣ c ⟩ ⟨ c ∣ \vert c \rangle \langle c \vert ∣ c ⟩ ⟨ c ∣ b b b c c c
P 0 , … , P m − 1 P_0,\ldots,P_{m-1} P 0 , … , P m − 1 P 0 T , … , P m − 1 T P_0^{T},\ldots,P_{m-1}^{T} P 0 T , … , P m − 1 T J ( Φ ) J(\Phi) J ( Φ ) Y \mathsf{Y} Y
Tr Y ( J ( Φ ) ) = ∑ a = 0 m − 1 P a T = I X T = I X , \operatorname{Tr}_{\mathsf{Y}} (J(\Phi)) = \sum_{a = 0}^{m-1} P_a^T = \mathbb{I}_{\mathsf{X}}^T = \mathbb{I}_{\mathsf{X}}, Tr Y ( J ( Φ )) = a = 0 ∑ m − 1 P a T = I X T = I X , が得られ、Φ \Phi Φ
部分測定
複数の系が合わせて量子状態にある場合に、その一つの系に対して一般的な測定を行うことを考えます。この測定により、測定とその系の事前状態によって決まる確率にしたがってランダムに測定結果の一つが得られます。その後、残りの系の状態は一般に、どの測定結果が得られたかに依存します。
一対の系 ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) X \mathsf{X} X Z \mathsf{Z} Z Y \mathsf{Y} Y
測定前の ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ
ρ = ∑ b , c = 0 n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c \rho = \sum_{b,c = 0}^{n-1} \vert b\rangle\langle c\vert \otimes \rho_{b,c} ρ = b , c = 0 ∑ n − 1 ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c この式では、X \mathsf{X} X 0 , … , n − 1 0,\ldots,n-1 0 , … , n − 1
測定自体は行列の集合 { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 } { 0 , … , m − 1 } \{0,\ldots,m-1\} { 0 , … , m − 1 } Y \mathsf{Y} Y X \mathsf{X} X Y \mathsf{Y} Y Φ \Phi Φ
Φ ( ξ ) = ∑ a = 0 m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ \Phi(\xi) = \sum_{a = 0}^{m-1} \operatorname{Tr}(P_a \xi)\, \vert a \rangle \langle a \vert Φ ( ξ ) = a = 0 ∑ m − 1 Tr ( P a ξ ) ∣ a ⟩ ⟨ a ∣ 結果の確率
系 X \mathsf{X} X X \mathsf{X} X ρ X \rho_{\mathsf{X}} ρ X a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}\bigl( P_a \rho_{\mathsf{X}}\bigr) =
\operatorname{Tr}\bigl( P_a \operatorname{Tr}_{\mathsf{Z}}(\rho)\bigr) =
\operatorname{Tr}\bigl( (P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho \bigr) Tr ( P a ρ X ) = Tr ( P a Tr Z ( ρ ) ) = Tr ( ( P a ⊗ I Z ) ρ ) 第1の表現は、単一系の測定についてすでに分かっていることから、結果 a a a ρ X = Tr Z ( ρ ) \rho_{\mathsf{X}} = \operatorname{Tr}_{\mathsf{Z}}(\rho) ρ X = Tr Z ( ρ )
第3の表現を得るにはさらなる考察が必要です。学習者は自分でこれが成り立つことを確かめることをお勧めします。ヒント:第2と第3の表現の同値性は、ρ \rho ρ P a P_a P a ρ = M ⊗ N \rho = M\otimes N ρ = M ⊗ N
前の式における第1と第3の表現の同値性はすぐには明らかでないかもしれませんが、直感的に理解できます。X \mathsf{X} X Z \mathsf{Z} Z X \mathsf{X} X ( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z )
{ P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . \{P_0\otimes\mathbb{I}_{\mathsf{Z}}, \ldots, P_{m-1}\otimes\mathbb{I}_{\mathsf{Z}}\}. { P 0 ⊗ I Z , … , P m − 1 ⊗ I Z } . 測定結果に条件付けられた状態
各結果の確率だけでなく、各測定結果に条件付けられた Z \mathsf{Z} Z Φ \Phi Φ X \mathsf{X} X Z \mathsf{Z} Z
( Φ ⊗ Id Z ) ( ρ ) = ∑ b , c = 0 n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = ∑ a = 0 m − 1 ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ ∑ b , c = 0 n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = ∑ a = 0 m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) \begin{aligned}
(\Phi\otimes\operatorname{Id}_{\mathsf{Z}})(\rho)
& = \sum_{b,c = 0}^{n-1} \Phi(\vert b\rangle\langle c\vert) \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \sum_{b,c = 0}^{n-1} \operatorname{Tr}(P_a \vert b\rangle\langle c\vert)
\,\vert a\rangle \langle a \vert \otimes \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes \sum_{b,c = 0}^{n-1}
\operatorname{Tr}(P_a \vert b\rangle\langle c\vert) \rho_{b,c}\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\sum_{b,c = 0}^{n-1} \operatorname{Tr}_{\mathsf{X}}\bigl((P_a\otimes\mathbb{I}_{\mathsf{Z}})
(\vert b\rangle\langle c\vert\otimes\rho_{b,c})\bigr)\\
& = \sum_{a = 0}^{m-1} \vert a\rangle \langle a \vert \otimes
\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho\bigr)
\end{aligned} ( Φ ⊗ Id Z ) ( ρ ) = b , c = 0 ∑ n − 1 Φ ( ∣ b ⟩ ⟨ c ∣ ) ⊗ ρ b , c = a = 0 ∑ m − 1 b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ∣ a ⟩ ⟨ a ∣ ⊗ ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr ( P a ∣ b ⟩ ⟨ c ∣ ) ρ b , c = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ b , c = 0 ∑ n − 1 Tr X ( ( P a ⊗ I Z ) ( ∣ b ⟩ ⟨ c ∣ ⊗ ρ b , c ) ) = a = 0 ∑ m − 1 ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) Φ \Phi Φ Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
最後の一ステップで、この式を求めているものを明らかにする形に変換します。
∑ a = 0 m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) \sum_{a = 0}^{m-1} \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)\,
\vert a\rangle \langle a \vert \otimes \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)} a = 0 ∑ m − 1 Tr ( ( P a ⊗ I Z ) ρ ) ∣ a ⟩ ⟨ a ∣ ⊗ Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) これは、「密度行列」のレッスンで見た古典量子状態 の例です。
∑ a = 0 m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , \sum_{a = 0}^{m-1} p(a)\, \vert a\rangle\langle a\vert \otimes \sigma_a, a = 0 ∑ m − 1 p ( a ) ∣ a ⟩ ⟨ a ∣ ⊗ σ a , 各測定結果 a ∈ { 0 , … , m − 1 } a\in\{0,\ldots,m-1\} a ∈ { 0 , … , m − 1 }
p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) で Y \mathsf{Y} Y ∣ a ⟩ ⟨ a ∣ \vert a \rangle \langle a \vert ∣ a ⟩ ⟨ a ∣ Z \mathsf{Z} Z
σ a = Tr X ( ( P a ⊗ I Z ) ρ ) Tr ( ( P a ⊗ I Z ) ρ ) . (2) \sigma_a = \frac{\operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}{\operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho)}.
\tag{2} σ a = Tr ( ( P a ⊗ I Z ) ρ ) Tr X ( ( P a ⊗ I Z ) ρ ) . ( 2 ) つまり、これは
Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ ) をそのトレースで割って正規化することで得られる密度行列です。(形式的には、状態 σ a \sigma_a σ a p ( a ) p(a) p ( a ) p ( a ) = 0 p(a) = 0 p ( a ) = 0
結果の確率は、これまでの観察と整合していることが自然に分かります。
まとめると、( X , Z ) (\mathsf{X},\mathsf{Z}) ( X , Z ) ρ \rho ρ X \mathsf{X} X { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
各結果 a a a p ( a ) = Tr ( ( P a ⊗ I Z ) ρ ) p(a) = \operatorname{Tr}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) p ( a ) = Tr ( ( P a ⊗ I Z ) ρ )
結果 a a a Z \mathsf{Z} Z ( 2 ) (2) ( 2 ) σ a \sigma_a σ a Tr X ( ( P a ⊗ I Z ) ρ ) \operatorname{Tr}_{\mathsf{X}}\bigl((P_a \otimes \mathbb{I}_{\mathsf{Z}}) \rho) Tr X ( ( P a ⊗ I Z ) ρ )
一般化
この記述は、系の順序が逆になる場合や3つ以上の系がある場合など、他の状況にも適用できます。概念的には直截ですが、式を書き下すのが煩雑になることがあります。
一般に、r r r X 1 , … , X r \mathsf{X}_1,\ldots,\mathsf{X}_r X 1 , … , X r ( X 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_r) ( X 1 , … , X r ) ρ \rho ρ X k \mathsf{X}_k X k { P 0 , … , P m − 1 } \{P_0,\ldots,P_{m-1}\} { P 0 , … , P m − 1 }
各結果 a a a
p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) . p(a) = \operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr). p ( a ) = Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) .
結果 a a a ( X 1 , … , X k − 1 , X k + 1 , … , X r ) (\mathsf{X}_1,\ldots,\mathsf{X}_{k-1},\mathsf{X}_{k+1},\ldots,\mathsf{X}_r) ( X 1 , … , X k − 1 , X k + 1 , … , X r )
Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) \frac{\operatorname{Tr}_{\mathsf{X}_k}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)}{\operatorname{Tr}\bigl((\mathbb{I}_{\mathsf{X}_1}\otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_{k-1}} \otimes P_a \otimes \mathbb{I}_{\mathsf{X}_{k+1}} \otimes \cdots \otimes\mathbb{I}_{\mathsf{X}_r}) \rho\bigr)} Tr ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ ) Tr X k ( ( I X 1 ⊗ ⋯ ⊗ I X k − 1 ⊗ P a ⊗ I X k + 1 ⊗ ⋯ ⊗ I X r ) ρ )